
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
2009年人工智能与计算智能国际会议
基于PLC的模糊控制器在污水处理系统中的应用
摘要
为了解决工业领域常常出现的长时间延迟、非线性和建立准确数学模型困难等问题, 我们将先进的智能控制方法与传统的自动化设备相结合, 提出了一种先进的人工智能控制方法。根据模糊控制原理和 PLC 的特点运行模糊控制器。本课题的模糊控制器是在西门子S7-300 PLC的基础上实现的,采用梯形图编程。并且已经在呼伦贝尔东能化工厂污水处理电气控制系统中进行了现场应用。通过不断的调试,还证明该模糊系统不仅具有优良效率和可靠性,而且也是智慧化程度优于传统的 PLC 自动控制系统, 具有较好的效率和可靠性。也有着相当广阔的应用前景。
1.介绍
在实际的工业过程控制系统中,由于系统的时滞和非线性,很难获得精确的数学模型。近年来,针对这类问题提出了许多新的处理方法,模糊控制就是其中之一。模糊控制利用模糊逻辑对人的控制经验进行定性描述,并利用模糊集理论对描述进行量化,使控制器能够模仿人的操作策略,形成所谓的模糊控制器[1]。
模糊控制依赖于操作者的经验或者实际的实验结果,而不是数学模型,因此模糊控制可以完全代替人工操作。模糊控制通过依赖操作者的经验,并在此基础上克服了不确定性因素,使系统更加可靠。更重要的是。它解决了传统线性理论[2]无法用控制器来解决的控制问题。
在模糊控制的应用领域,模糊控制器的实现主要由PC机、单片机和模糊控制芯片来实现。但在工业控制中,特别是在过程控制中,可编程逻辑控制器(简称PLC)有着广泛的应用。如果将模糊控制技术与PLC相结合,模糊控制器将发挥更大的作用。
最近,一些制造商提供了具有模糊控制功能的PLC模块,但价格非常高。在传统PLC的基础上采用软件编程实现模糊控制器的功能,可以大大降低成本,同时使传统的控制系统更加稳定高效。
本文主要研究西门子S7-300PLC模糊控制的实现及其在污水处理系统中的实际应用。
2.系统介绍
污水处理系统具有回应时间长、反应复杂度高和投入产出关系的非线性时变特性等特点, 是典型的长时滞、非线性时变、多目标系统 [1]。要建立一个准确的数学系统模型是很困难的。然而尽管如此, 技术工人仍旧可以以丰富的实践经验操作该系统, 并通过 '艺术操作' 获得满意的结果,因此,我们提出采用模糊控制技术来处理污水倾角系统[3]的一些问题。
3.模糊控制器的设计
模糊控制系统的设计可分为硬件平台设计和软件设计两部分, 包括模糊控制演算法的设计。该系统的硬件平台以西门子 s7-300 PLC 为基础。在软件方面, 我们使用西门子 STEP7 和 MCGS组态软件对模糊控制演算法进行程式设计 [4] [5]。根据实际问题和特殊条件设计了常用的模糊控制器, 并用于预期目的。一旦确定了控制器的隶属函数或控制规则并将其放入微处理器的记忆体中, 就永远无法更改这些规则。本文基于软体的模糊控制器实现了模糊控制器。它以普遍性为目标, 根据不同的客户需求灵活地控制不同的实际流程。本文提出的基于软体的控制器控制精度高、灵活性强。采用了表查找的方法, 所需资源相对较少, 满足了系统的要求。因此, 本文采用电脑离线计算和 plc线上查找的方法实现了模糊控制。
3.1模糊控制规则与原理
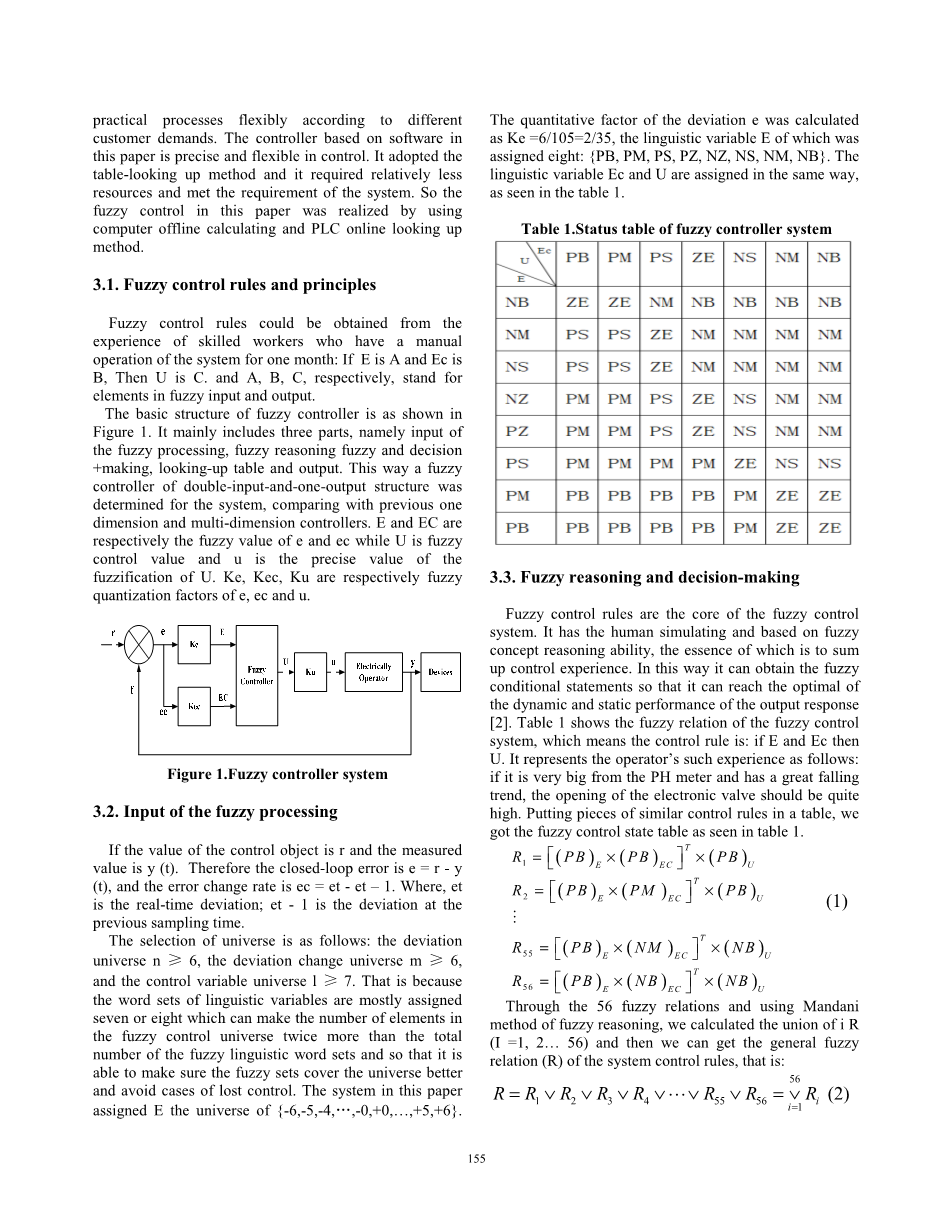
模糊控制规则可以从手工操作系统一个月的技术工人的经验中获得: 如果 e daibiao a, ec 代表 b, 那么 u 分别为 c 和 a、b、c, 代表模糊输入和输出中的元素。模糊控制器的基本结构如图1所示。主要包括模糊处理输入、模糊推理模糊和决策 决策、查找表和输出三个部分。通过这种方法, 确定了系统的双输入单输出结构模糊控制器, 并与以前的一维和多维控制器进行了比较。e 和 ec 分别是 e 和 ec 的模糊值, u 是模糊控制值, 而 u. k、kec、ku 的模糊化的精确值分别是 e、EC 和u 的模糊量化因子。
图1
3.2. 模糊处理的输入
如果控制对象的值为r,测量值为y(t),则对应的闭环误差为e = r - y(t),误差变化率为ec = et - et - 1。式中,et为实时偏差;et-1是前一次采样时间的偏差。
选择领域如下:偏差量nge;6,偏差变化量mge;6,控制变量lge;7。这是因为语言变量的词集大多分配7或8,这使得模糊控制领域的元素数量超过总数的两倍模糊语言词集,以便它能够确保模糊集覆盖更好,避免失去控制的情况下。本文的系统分配E的集合为{-6,-5,-4,hellip;,-0, 0,hellip;, 5, 6}。偏差e的量化因子Ke =6/105=2/35,语言变量e赋值为:{PB, PM, PS, PZ, NZ, NS, NM, NB} 8。语言变量Ec和U的赋值方式相同,如表1所示。
表1
|
E U |
PB |
PM |
PS |
ZE |
NS |
NM |
NB |
|
NB |
ZE |
ZE |
NM |
NB |
NB |
NB |
NB |
|
NM |
PS |
PS |
ZE |
NM |
NM |
NM |
NM |
|
NS |
PM |
PM |
ZE |
NM |
NM |
NM |
NM |
|
NZ |
PS |
PS |
PS |
ZE |
NS |
NM |
NM |
|
PZ |
PM |
PM |
PS |
ZE |
NS |
NM |
NM |
|
PS |
PM |
PM |
PM |
PM |
ZE |
NS |
NS |
|
PM |
PB |
PB |
PB |
PB |
PM |
ZE |
ZE |
|
PB |
PB |
PB |
PB |
PB |
PM |
ZE |
ZE |
3.3模糊推理与决策
模糊控制规则是模糊控制系统的核心。它具有人的模拟能力和基于模糊概念的推理能力,其实质是对控制经验的总结。这样就可以得到模糊条件语句,从而达到输出响应[2]的动静态性能的最优。表1显示了模糊关系的模糊控制系统,这意味着控制规则是:列如E和Ec,它代表了运营商的经验如下:如果它是非常大的酸度计并且有很大的下降趋势,开放的电子阀应该很高。将相似的控制规则片段放入表中,得到模糊控制状态表,如表1所示。
表 (1)
|
R1 = ⎡⎣(PB)E times;(PB)EC ⎤⎦T times;(PB)U |
|
R2 = ⎡⎣(PB)E times;(PM )EC⎤⎦Ttimes;(PB)U |
|
: |
|
R55 = ⎡⎣(PB)E times;(NM )EC ⎤⎦T times;(NB)U |
|
R56 = ⎡⎣(PB)E times;(NB)EC ⎤⎦T times;(NB)U |
通过56个模糊关系,利用曼达尼模糊推理方法,计算出了i R的并集(i = 1,2hellip;56),得到了一般模糊系统控制规则的关系(R),即:
R=R1nu;R2nu;R3nu;R4nu;hellip;nu;R55nu;R56=R1 (2)
3.4 查找表和输出
根据上述讨论计算出模糊关系R后,通过推理可以综合规则计算:
(3)
考虑E和Ec中的所有元素,在相应的话语空间中的绝对模糊集E和Ec,可以得到输出语言变量,ij U“14times;13 = 182”模糊子集。由于最大隶属度法计算简单,且存在二次信息丢失较多的缺点,因此仅适用于要求一般性能的模糊控制系统。中值法是对有限信息的总结,计算复杂,特别是在连续宇宙中定义隶属度函数时,需要求解积分方程。因此,与加权平均法相比,它的应用较少,加权平均法具有更全面的功能。本文采用加权平均法对模糊集进行模糊图像处理,以偏差E的全域元素为行,偏差变化率Ec的全域元素为列。生成的表称为查找表,如表2所示。
表2
|
U |
-6 |
-5 |
-4 |
-3 |
-2 |
-1 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
-6 |
7 |
6 |
7 |
7 |
7 |
7 |
7 |
4 |
4 |
2 |
0 |
0 |
0 |
|
-5 |
6 |
6 |
6 |
6 |
6 |
6 |
6 |
4 |
4 |
2 |
0 |
0 |
0 |
|
-4 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[609499],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


