英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
专家模糊PID控制方法在加热炉温度控制中的应用
摘要
为了解决非线性问题, 加热炉的大延迟和时变, 模糊PID控制和专家决策的组合被用于调节温度,并且专家模糊PID控制器得以设计。在这种控制器中,PID参数由模糊推理算法调整,因此它具有自适能力。专家决策可以降低接近设定值的温度扰动。当误差大于高设定值时,模糊PID被用来控制温度。否则,专家决策被选中。仿真和实验结果表明,基于专家模糊PID算法的温度控制系统相比传统的PID具有更快的响应速度,超调量小,鲁棒性更高的优点。
- 简介
因为加热炉具有非线性,时变性和大延迟的缺点,它的控制效果往往不尽如人意。因此,去寻求一种有效和准确控制加热炉温度的方法是非常重要的。在近些年,随着模糊理论和神经网络理论的不断发展。加热炉的智能控制已经成为一个热门话题和重要的研究领域。
模糊PID控制技术已广泛应用于许多领域,特别是在加热炉的温度控制领域,因为它的简单性,柔韧性,实用性,稳定性,高精度和高鲁棒性。然而,模糊控制器的控制规则和隶属函数是人为设定的,因此要满足时变性和滞后性的动态要求是困难的。所以,为了满足实时控制的要求,专家系统被引入。经验知识存储在计算机上,并且知识数据库与实际被结合起来用以提高控制效果。专家控制器能够使系统在更短的时间内进入稳定状态。将两者结合起来不是二者简单的叠加,控制系统的实现需要从各方面进行考虑,而一旦控制系统设计完成,我们得到的,也不仅仅是两种传统控制系统的叠加,而是一种新的,具有应用前景的新的控制器。
在本文中,温度控制系统是根据模糊PID控制与专家控制的结合来设计的,并且专家模糊PID控制器有着详细的介绍与描述。
- 加热炉温度控制系统的结构
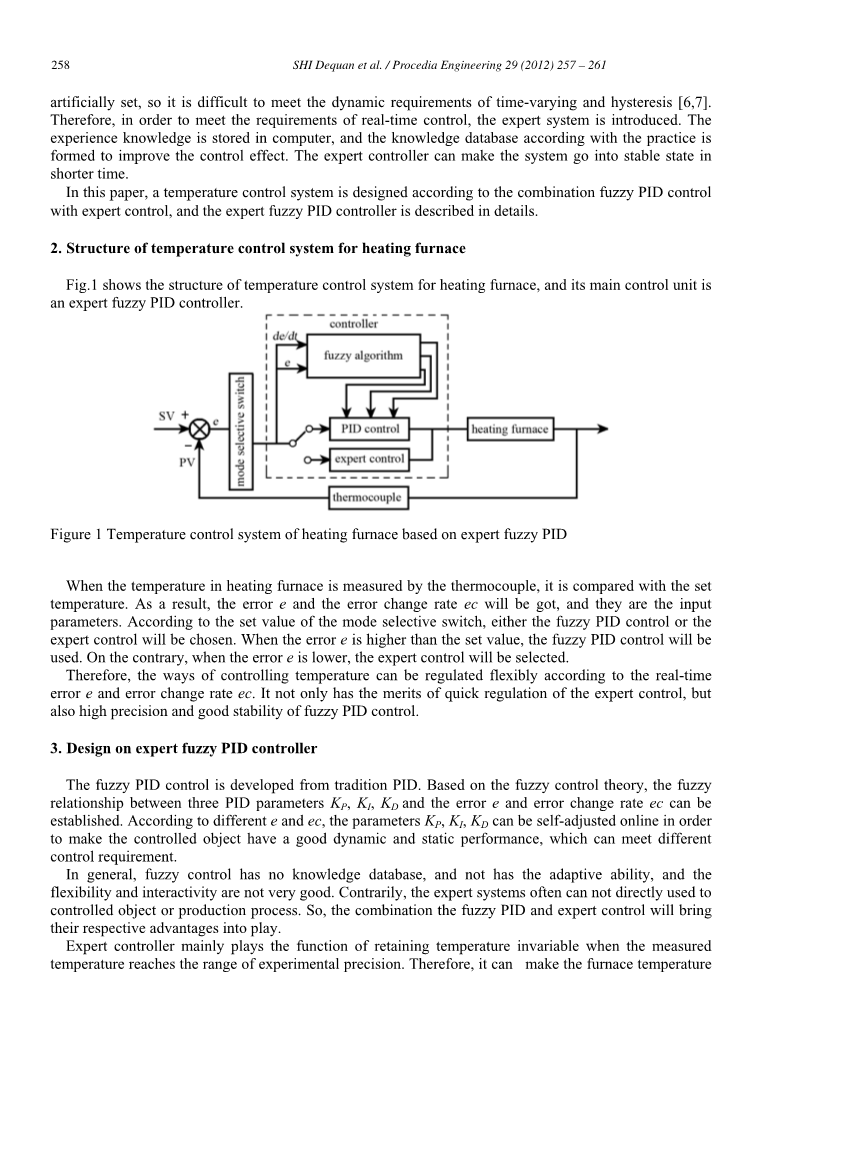
图1所示是加热炉温度控制系统的构成,它的主控制单元是专家模糊PID控制器。
图1.基于专家模糊PID的加热炉温控系统
当加热炉的温度由热电偶测得时,将它与设定值相比。其误差e和误差变化率ec将得到,并且将它们作为输入参数。根据模式选择开关的设定值,模糊PID控制与专家控制之一将被选择。当误差e大于设定值时,模糊PID控制将会起作用。与此相反,当误差e小于设定值时,专家控制将起作用。
因此,控制温度的方式可根据实时误差e和误差变化率ec灵活调节。它不仅具有专家控制快速调节的优点,而且还具有模糊PID控制精度高,稳定性好的优点。这种将两种控制器结合起来并实施控制的设计从理论上讲是可行的,那么,该如何进行设计,它的设计规则又是怎样的呢,下一节将给出讲解。
- 专家模糊PID控制器设计
模糊PID控制是从传统的PID发展而来. 基于模糊控制理论,PID三项参数KP, KI, KD与误差e、误差变化率ec之间的模糊关系可以被建立。根据不同的e和ec,参数KP, KI, KD可以在线自动调节,以使被控对象具有良好的动、静态性能,进而满足不同的控制要求。
一般情况下,模糊控制没有知识数据库,不具有自适应能力,而且灵活性和交互性不是很好。特别地,专家系统经常不能直接用于受控对象或生产过程。因此,结合模糊PID和专家控制能发挥他们各自的优势。
当所测量的温度达到实验精度的范围内时,专家控制器主要起到保持温度不变的功能。因此,它可以使炉内温度稳定,并避免在误差范围内的温度扰动,以迅速满足试验要求。专家PID控制器主要由专家决策程序语句中的“if - then”组成。
专家模糊PID控制器主要由模糊化,模糊推理,去模糊化和专家决策组成,它的设计过程可以推导如下。
3.1.模糊化
一般而言,传统的PID控制器可以有如下式子给出:
当PID的参数由模糊控制调节时,传统的PID控制器成为模糊PID控制器,并且公式可以表示为:
在这里,KP ′ 、 KI′ 、 KD ′是初始PID参数, k p , ki , kd是调整PID参数。
如果误差e,误差变化率ec,以及PID参数k p , ki , kd的模糊集合域定义为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊集合则是{NB,NM,NS,PS,PM,PB}。该隶属函数可以被定义为线性的或非线性函数。在这项研究中,这个函数是高斯分布,表示为:
在这里,bgt;0,并且a作为模糊集合NB,NM,NS,PS,PM,PB的响应可以是 6, 4, 2, 0,-0,-2,-4,-6。
3.2.模糊规则
隶属函数被定义后,根据专家的经验,k p , ki , kd之间的适当模糊规则可以被建立起来,并将它们分别示于表1,表2和表3。
表1. k p的模糊规则 表2. ki的模糊规则 表3. kd的模糊规则
3.3.模糊推理和去模糊化
根据模糊表,我们可以得到49times;3的模糊规则,它们可以被描述如下。
在这里,Ai, Bj 和Cij分别 是误差 E,误差变化率EC,PID参数kp , ki , kd数的模糊集。
因此,R的隶属函数可表示为
并且PID参数kp可以表示为如下形式:
因此,kp的输出如下。
同样,ki , kd的输出也可以通过同样的推导得到。
3.4.专家决策
当测得的温度接近设定值,并达到精度要求时,专家控制被通过模式选择开关选中。在这一瞬间,控制器的输出保持不变,即u(k)=u(k-1)。因此,加热炉的温度将趋于稳定。当稳定的温度已经超出了误差范围,模式选择开关将会转向模糊PID控制。
- 实验与结果分析
加热炉的温度控制可以通过一个纯粹的时间延迟加上惯性输入来表达。根据实验,该模型可以写成下面的等式。
在单位阶跃输入的条件下,传统PID控制和专家模糊PID对温度控制系统的控制结果分别如图2所示。
图2.PID控制和模糊PID控制的仿真结果
从图2可以看出,专家模糊PID算法的超调量约为2%,而传统的PID算法的超调12%左右。此外,专家模糊PID算法的调节时间算法约为65秒,而PID算法的调整时间超过100秒。因此,专家模糊PID控制算法具有响应速度快,超调小,调节时间短和良好的稳定性的优势。根据上图我们可以清楚的看到两种温度控制器的性能优劣,这对于我们以后在实施温度控制的实现上具有一定的参考价值。
一些关于加热炉温度控制的实验是在实验室里条件下进行的。在这种较为理想的情况下,我们设定如下情况。当控制温度在750℃并且稳定后,设定值突然从750℃升高到780℃,系统会作出一定的响应,为了得到这种响应,我们测得大量数据,并将他们绘制成响应曲线,系统温度调节曲线如图3所示。当然,现实条件可能不如实验室条件理想,但是这条响应曲线还是具有非常大的参考价值,它告诉我们在扰动突然出现时,系统的响应情况。
图3. 电阻加热炉温度控制曲线
可以从图3中看出,温度将在230S之后重新稳定在780℃,并且温度波动是非常小的。它表明,该系统具有良好的控制性能和高鲁棒性。
结论
专家模糊PID方法被用来来调节加热炉的温度,并设计了专家模糊PID控制器。该控制器具有模糊控制精度高和专家控制响应速度快等诸多优点。仿真结果表明,专家模糊PID控制器在超调,上升时间以及响应速度等方面优越于常规PID控制器。加热炉的实际实验还表明,当温度控制效果越好,温度越更快达到稳定。
感谢
作者要感谢Y. L. Wang和J. L.Zhang关于课题的非常有用的讨论和实验支持。在完成这项研究的过程中,我得到过他们很大的帮助,许多学术上的探讨与问题的解决以及结果的分析都有这两位的参与。这项工作得到了国家自然科学基金(51105121)、黑龙江省(E201129)国家自然科学基金,中国博士后科学特别基金(2011044447)和黑龙江省博士后科学基金(LBH-210106)的大力支持。
基于模糊自整定PID的智能温度控制系统的设计
摘要
温度控制系统逐渐在工业生产中起到了越来越重要的作用。近年来,大量的研究已经研究了基于各种控制策略的温度控制系统。基于模糊自整定PID控制器的温度控制系统在本文中提出。基于模糊自整定PID的新算法可以提高系统的性能。此外,它适用于复杂的变温控制系统。仿真结果表明提出的策略的可行性。
- 简介
近来,真空冶金技术因为它低能源浪费,无污染,高回收率,收益优势等特点在现代冶金行业起到了重要的作用。温度控制系统也是真空冶炼过程中的一个重要组成部分。在一般情况下,大部分的真空熔炼温度控制系统使用常规的PID调节器,因为它是非线性,随时间变化和大滞后的。然而,常规的PID这种非线性系统是难以达到控制的期望效果的。除此此外,当被控对象的特征变化时,PID调节器的参数需产生相应的调整。
各种策略如PID,模糊,人工智能,模糊PID自整定等已应用到温度控制系统中。模糊自整定PID算法,是很容易实现并且有效的,已被广泛应用于温度控制系统。传统的PID控制在某些生产场合已经适应不了相应的控制要求,因此,不得不去寻找更为高效的控制算法,并将其设计出来。
本文主要侧重于控制温度的新型模糊自整定PID算法的设计。该目的是提高系统的性能并降低温度波动。
本文的要点如下:系统的模型在第二节给出。模糊自整定PID控制器的设计在第三节提供。算法分析的仿真结果在第四节介绍。最后,结束语在第五节。仿真结果说明了提出的方法的有效性。
- 系统模型
从上面的描述中,在控制理论中,真空冶金的控制对象是一个典型的一阶延迟系统。它可以表示为如下:
其中K为控制对象的静态增益,tau;是控制对象的纯滞后时间,T是被控对象的时间常数。
PID是一个非常著名的控制器。它被广泛地用作控制模块。常规的PID的传递函数可以表达为:
开-关控制图显示在图1.因此,该系统基于常规的PID的数学模型示于图2。
图1.开-关控制图
图2.控制系统模型
- 模糊自整定PID控制器的设计
3.1模糊自整定PID控制器的原理
新的模糊PID控制器以传统PID作为基础,它使用模糊理论和变量讨论域线上自动调节PID参数。模糊自整定PID控制器的结构图3所示。
图3.模糊自整定PID控制器
从图2,我们可以看出误差和误差变化率被用作控制器的输入变量,并且输出变量是PID控制的参数,他们是Delta;Kp,Delta;Ki和Delta;Kd。在这里,e表示系统误差,ec表示系统误差变化率。
图4.误差域
其中,NB,NM,NS,0,PS,PM和PB语言值。它们分别代表“负大值”,“负中等”,“ 负小值” ,“0” ,“正小值” “正中值” ,“正大值”。
图5.误差变化率域
3.2模糊自整定PID控制器的控制规则
设定的语言规则是模糊逻辑控制器的必不可少的部分。在许多情况下,转换专家经验到这样的规则是很容易的。可以创建任何数量的规则去定义模糊控制器的操作。本文中,模糊控制规则的设计是基于医用机器人可以快速和稳定接近目标。常规模糊条件和模糊关系“如果e是A,ec是B,则Delta;Kp为C,Delta;Ki为D,Delta;Kd为E”的应用可以建立模糊规则,最终确定的模糊规则列于下表。
表1.Delta;Kp的模糊规则
表2. Delta;Ki的模糊规则
表3. Delta;Kd的模糊规则
构建模糊控制规则表后(Delta;Kp、Delta;Ki、Delta;Kd),我们可以通过以下方法作
出自适应校正:
基于以上分析,根据PID自整定参数的原理,模糊自整定PID的模型可以如图6所示。
图6.模糊自整定PID模型
-
<stro
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148015],资料为PDF文档或Word文档,PDF文档可免费转换为Word
</stro
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


