
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
4
三维数字图像的几何特征
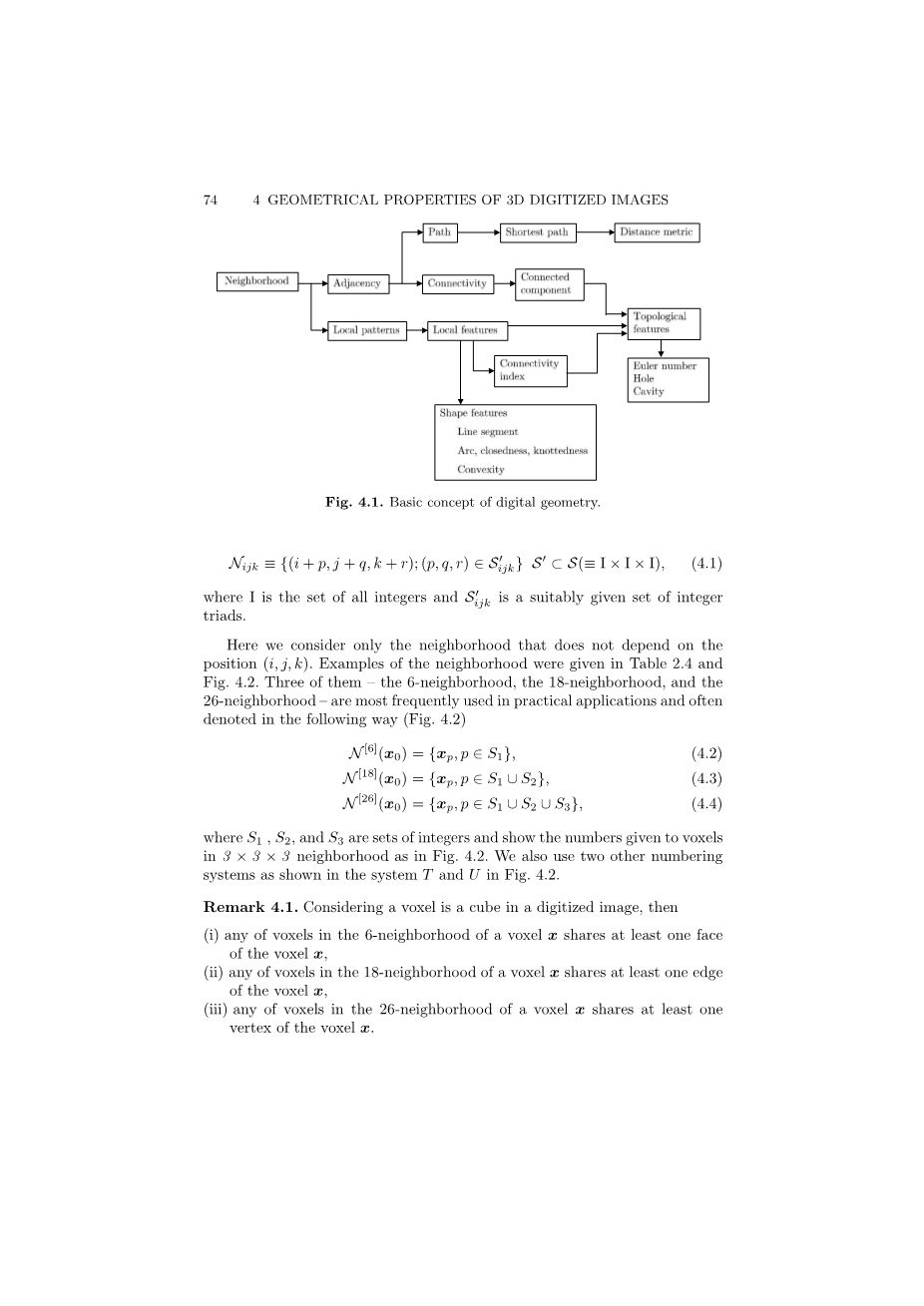
一幅二进制数字图像只含有两组像素:1像素组和0像素组。假定我们所感兴趣的1像素组为图像。另一组则称作背景。二进制数字图像的特性往往与现实中的连续图像存在许多不同。数字几何学则是研究数字图像的几何特征。在这一章中,我们先简要介绍数字几何学的基础理论,再讨论数字几何学的未来发展趋势。如图4.1所示,是数字几何学最重要的基本概念。
在4.1章节中,介绍完邻域和连通性的基本概念后,我们将开始讨论三个重要的拓扑特征,包括类、连通性指标以及他们二者之间的关系。接下来,我们会详细解释1像素组分辨力的概念,以及任意算法保存二进制图像拓扑特征的情况。同时,我们也会简单列举用到以上拓扑特征的情况。
在这一章中,我们仅关注二进制图像。我们假定图像包含一个由行I、列J和面K组成的三维数组。同时,假定第一行、第一列与第一面都由0填满。这些由0填满的行、列与面称作图像的边缘。
4.1 邻域和连通性
4.1.1 邻域
正如图4.1所示,我们将开始讨论二进制图像的邻域和连通性,同时将讲解连通组。在2.4.2章节中,我们已经对邻域进行了一下定义:
定义 4.1 (领域) 对于以i、j和k表示的三位数组的邻域,以Nijk((i,j,k))表示,其方程如下:
(4.1)
其中,I为整数,为整数三维数组。
这里我们只考虑与位置无关的邻域。在表格2.4和图4.2中,我们给出了邻域的例子。而6邻域、18邻域和26邻域在实际应用中较为频繁,通常用下式表示:
(4.2)
(4.3)
(4.4)
其中,,和是整数,其数值为图4.2中的邻域。我们同时也用了其他两个的数组,如图4.2所示的数组T和数组U。
定理 4.1 考虑到一个体元像素是一幅数字图像中的一个立体单元,因此
(i)体元x的6邻域中的任何一个体元至少与体元x共享一面,
(ii)体元x的18邻域中的任何一个体元至少与体元x共享一条边,
(iii)体元x的26邻域中的任何一个体元至少与体元x共享一个顶点。
如果体元x和体元y满足关系,则称体元x与体元y为6-相邻,同样的,也可以称体元x是体元y的6-相邻。18-相邻和26-相邻也是按同样的方式定义。
定理 4.2 如果体元v(i,j,k)的领域关于v(i,j,k)对称,等同于,反之亦然。若邻域不对称,则该定理不成立。
定理 4.3 正如2.4.2章节所述,体元x的邻域通常可以包含也可以不包含体元x自身。例如,体元x的6邻域和18邻域就没有包含体元x,但是体元x的邻域则包含体元x。
4.1.2 连通性和连通组
让我们先定义邻域中两个体元的连通性。
定义 4.2(连通性) 如果存在一个体元序列,每一个都在的6邻域(18邻域或26邻域)中,同时所有与、有相同的值,则称和是6连通(18连通或26连通)。因此,可以确定6连通、18连通和26连通都是给出一种值为1(或0)的体元的等同关系。
定理 4.4(等同关系) 假定有两种任意元素的组,我们可以决定一个先定关系“~”是否成立。如果这个关系“~”满足以下所有法则,我们则称该关系为等同关系:
(i)(反射法则)
(ii)如果,则(对称法则)
(iii)如果,并且,则(传递法则)
如果,我们称x等同于y。所有等同于x的体元的组称作x的等同类。
定义 4.3(连通组) 图像中所有的体元都可以通过与其他同类的体元匹配来分成不同的类。每一个派生出的类叫做连通组。更准确地说,6连通的等同类叫做6连通组。18连通组和26连通组按照相似的方式定义。一个全为0体元的连通组叫做0连通组,全为1体元的连通组叫做1连通组。
定义 4.4(空腔) 任何没连接图像边缘的0连通组叫做空腔。
定义 4.5(空洞,柄) 假定一个1体元的连通组C,并假定一幅包含了连通组C所有1体元的图像Fc。每一个1体元将是一个立方元。图像Fc则称为相对应于C的连续图像。这一幅连续图像Fc的表面在连续三维空间中是一个接近弯曲的表面。如果这个接近弯曲的表面有一个空洞,则我们称这空洞为连通组C的空洞。
定义 4.6(单连通,多连通) 若一个1体元的连通组没有空腔或者空洞,则称该连通组为单连通,相反,则称多连通。
定理 4.5(18rsquo;连通) 尽管任意的6连通、18连通以及26连通被用作个别问题的分析,但都必须考虑避免1连接组和0连接组之间的矛盾。这要求仅有表4.1的连通组对才可以使用。为了维护理论的一致性,我们提出了18rsquo;连通组的概念。18rsquo;连通和18rsquo;邻域的定义与6连通的定义相似,其结构如图4.4所示。这种6体元的结构被认为是6体元18rsquo;连通的一面,也是6连通的循环。
一幅三维输入图像存在大于一个(偶尔存在大量)连通组。在计算机中,我们通过给予不同的连通组以不同的标签来区别这些连通组。其中一种标签方法是:所有在同一连通组的1体元都被标记一个整数,不同组间的1体元之间的整数也不相同。这个整数称作组标签,给所有1体元标上组标签的过程叫做分类。下一章,我们将讲解这个分类算法。
定理 4.6 标签通常为正整数,因为整数0被用作背景的标签。
有时候,一个组可能会出现多个空腔和空洞。一幅与定义4.5中的1连接组相一致的连续图像,其表面的空腔数会与1连接组的空腔数相同,除了连接组外表面的空腔数。一个空洞可能存在于外表面和空腔表面。一个柄就像是油炸甜圈的中空位置,一个游泳圈,一个咖啡杯的单孔手柄,一个双柄壶,一个眼镜框,一条短裤,也可以是一个多孔的海绵。从概念上讲,二维图像的空洞对应于三维图像的空腔。空洞和柄是三维图像的具体概念。
定理 4.7 似乎三维图像的柄(或者空洞)的明确概念并没有在文献中具体给出。例如,柄的数目曾用于解释“剪不开的剪切”这一观点。尽管三维图像的联动和结点算法并没有展示出来,不过也进行过相应的讨论。
对于三维图像,以下的定义是公众比较认同的。假设一个连通组C中的体元都是1。这样,连通组C的柄(空洞)的数目则取决于独立的一维异体同类的数目。
4.2 单形和单分解
单形是学习连续图像拓扑性质的重要概念之一。这里有一个认识维数概念的具体例子,该例子中的图像反映出各维度数。例如,一个点(0维)、一个闭合线段(1维)、一个三角形(2维)和一个四面体(3维)都是低维度的单形。
而我们需要拓展这些单形到数字图像邻域。图4.5展示了一种拓展单形的方法。
其定义如下:
定义 4.7(单形) 被用于三维图像分解的单形定义如下:
(1)0单形相当于每一个1体元。
(2)1单形相当于一对邻接的1体元。
(3)2单形相当于一组含有三个1体元的体元组,任何一个体元都与另外两个体元邻接,或者是一组含有四个体元的体元组,四个体元均在同一平面,且与另外三个体元中的两个邻接。
(4)3单形相当于一组含有四个1体元的体元组,任何一个体元都与另外三个体院相邻接,或者是一组含有五个或者更多1体元的体元组,并且不在同一面上,同时构成一个最少面数的多面体。
1单形、2单形和3单形分别被称作边缘元素、面元素和体积元素。单形的具体形式会根据连通性的改变而变化。图4.5展示了四种连通性的不同单形。
假设三维空间中存在一幅图像,并且用单形组的总和来表示这幅图像。如图4.6所示,这种表达如果符合以下要求,则称作单分解:
- 邻接两个仅共享一个1体元或一个边缘元素的面元素。
- 连接一个面元素和一个边缘元素,其中边缘元素的一个顶点与面元素的一个顶点相一致,或者边缘元素是面元素的其中一个边缘。
- 两个边缘元素仅由一个顶点连接。
三维图像的单分解并不总是唯一的,这取决于图像。
4.3 欧拉数
我们将介绍一种被广泛应用的数字图像拓扑性质,称作欧拉数或类。
定义 4.8(欧拉数,类) 假定一幅三维数字图像C及其单分解。则图像(一个连接组)C的欧拉数定义如下:
(4.5)
其中,表示k维单形的数目。欧拉数值大小取决于连通性的种类。
下面的等式是拓扑结构邻域中的欧拉·庞加莱公式:
属性 4.1
(4.6)
其中,为1连通组数(0维贝蒂数),为所有1连通组的空洞数(1维贝蒂数),为所有1连通组的空腔数(2维贝蒂数)。对于一幅二进制图像F,图像F中所有连接组的欧拉数的总和叫做图像F的欧拉数。
定理 4.8 上述三维图像C欧拉数的定义也可以如下描述:
(4.7)
对于包含多个图像的二进制图像F,可以通过对图像F中的所有图像按上式求解欧拉数来得到图像F的欧拉数。图像F的欧拉数如下:
(4.8)
定理4.9 三维图像C的欧拉数由定义4.5中连续图像的欧拉数所决定。如果我们需要区分定义4.8的欧拉数与以上方法所得到的欧拉数,那么定义4.8的欧拉数称作体积欧拉数,后者称作面欧拉数。一幅最小的三维图像至少含有一个体元。其表面是一个闭合表面,并且在其中存在一个空腔。因此,面欧拉数为
(4.9)
如果一幅图像没有柄,则其面欧拉数是体积欧拉数的两倍。
定理4.10 二维图像的欧拉数定义如下:
(4.10)
体积欧拉数是二维图像向三维图像的自然拓展。
4.4 连接组和图像拓扑结构的局部特征
三维二进制图像的拓扑特征被概括为连接组、柄和空腔的数目。连接组数可以从标签中轻易得到。该算法将在下一章中介绍。空腔数也可以通过转换图像的1和0而得到。但柄数目前难以准确计算。
计算单形数(公式4.5中的)的过程则相当费时。通过公式4.5和公式4.6或公式4.7可以间接地得到空洞数。
一个图像的处理算法会由于将图像中的1体元替换为0体元,将0体元替换为1体元,从而改变三维输入图像的形状。如果算法(处理过程)执行完成后,没有出现以下情况,则称该算法(处理过程)为保留拓扑结构:
- 分离了连接组、空洞和空腔
- 连接组、空洞和空腔的消失
- 创造了新的连接组、空洞和空腔
这里有一些局部特征可以描述拓扑结构的形状特征。下面让我们来介绍几个这种局部特征。
定义4.9 (可删性) 如果一个1体元x的转换部分(相当于转换为一个0体元)代表一幅输入图像的拓扑结构,则称该1体元x(严格来说,为m-可删性,m表示连通性的种类;m=6,18,18rsquo;,26)是可删除的。
定义4.10 (连通数) 1体元x的连通数(CN)的定义如下:
(4.11)
其中,和分别表示三维图像1体元在转换前后的欧拉数值,m代表连通性的种类(m=6,18,18rsquo;,26)。
定义4.11 (连通索引) 在一个包括1体元x及其26-邻域的邻域中,我们分别定义三个特征:组索引,空洞索引和空腔索引。
组索引等于与x相连接同时存在于18-邻域(则m=6或18rsquo;)的所有m连接组的数目(在26-邻域中,则m=18或26)。(表4.4的子模式是一种m=18rsquo;的简单连接组)
空洞索引等于转换x所产生的新空洞数,或者转换x过程中分区的0体元m-连通组的减少数。
空腔索引等于转换x时所产生的新空腔数。
我们将(,,)所构成的一组数叫做连通索引。
接下来,我们讨论一下这些特征的几个属性。这些特征值取决于每一个1体元和连通组m的种类。他们反映了x及其邻域局部形态的拓扑结构。
属性4.2 1体元x的连通数与体元x在1体元转换过程中连通索引的变化值相等。
(4.12)
(证明)连通数定义为1体元x转换过程中欧拉数的变化值(定义4.10)。由于欧拉数由等式4.5、等式4.6和等式4.7得出,因此容易推导得出以上结论。
定理4.11 1体元x转换过程中欧拉数的变化值(连通数)也可以用贝蒂数的变化值来表达:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146047],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 饮用水微生物群:一个全面的时空研究,以监测巴黎供水系统的水质外文翻译资料
- 步进电机控制和摩擦模型对复杂机械系统精确定位的影响外文翻译资料
- 具有温湿度控制的开式阴极PEM燃料电池性能的提升外文翻译资料
- 警报定时系统对驾驶员行为的影响:调查驾驶员信任的差异以及根据警报定时对警报的响应外文翻译资料
- 门禁系统的零知识认证解决方案外文翻译资料
- 车辆废气及室外环境中悬浮微粒中有机磷的含量—-个案研究外文翻译资料
- ZigBee协议对城市风力涡轮机的无线监控: 支持应用软件和传感器模块外文翻译资料
- ZigBee系统在医疗保健中提供位置信息和传感器数据传输的方案外文翻译资料
- 基于PLC的模糊控制器在污水处理系统中的应用外文翻译资料
- 光伏并联最大功率点跟踪系统独立应用程序外文翻译资料


